|
UCOS_TI_LM3S_Keil
|
#include <ucos_ii.h>
函数 | |
| void | OSTimeDly (INT32U ticks) |
| INT8U | OSTimeDlyHMSM (INT8U hours, INT8U minutes, INT8U seconds, INT16U ms) |
| INT8U | OSTimeDlyResume (INT8U prio) |
| INT32U | OSTimeGet (void) |
| void | OSTimeSet (INT32U ticks) |
| void OSTimeDly | ( | INT32U | ticks) |
参考 OS_ENTER_CRITICAL, OS_EXIT_CRITICAL, OS_Sched(), OSIntNesting, OSRdyGrp, OSRdyTbl, OS_TCB::OSTCBBitX, OS_TCB::OSTCBBitY, OSTCBCur, OS_TCB::OSTCBDly , 以及 OS_TCB::OSTCBY.
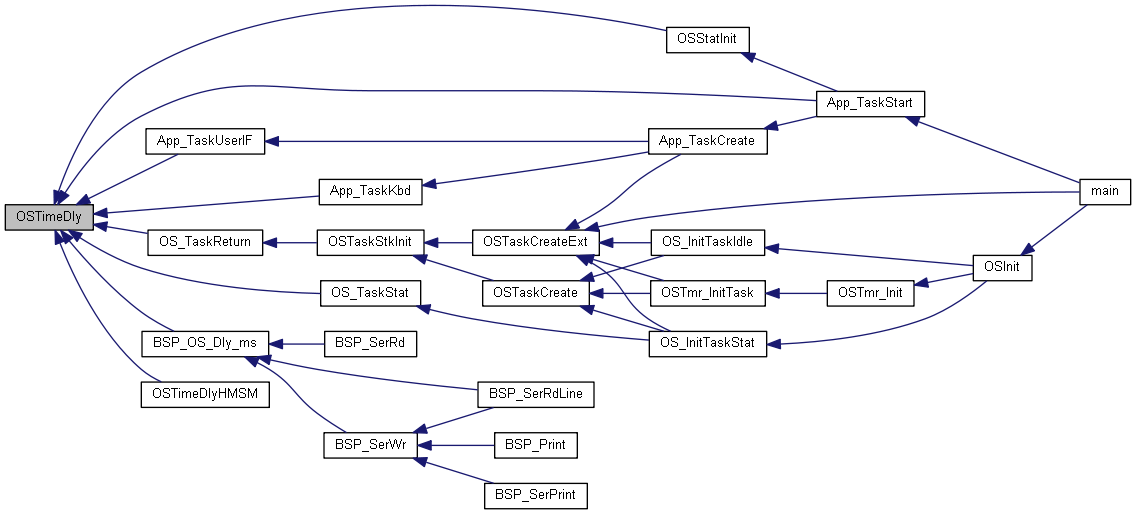
参考自 App_TaskKbd(), App_TaskStart(), App_TaskUserIF(), BSP_OS_Dly_ms(), OS_TaskReturn(), OS_TaskStat(), OSStatInit() , 以及 OSTimeDlyHMSM().

参考 OS_ENTER_CRITICAL, OS_ERR_NONE, OS_ERR_PRIO_INVALID, OS_ERR_TASK_NOT_EXIST, OS_ERR_TIME_NOT_DLY, OS_EXIT_CRITICAL, OS_LOWEST_PRIO, OS_Sched(), OS_STAT_PEND_ANY, OS_STAT_PEND_OK, OS_STAT_PEND_TO, OS_STAT_RDY, OS_STAT_SUSPEND, OS_TCB_RESERVED, OSRdyGrp, OSRdyTbl, OS_TCB::OSTCBBitX, OS_TCB::OSTCBBitY, OS_TCB::OSTCBDly, OSTCBPrioTbl, OS_TCB::OSTCBStat, OS_TCB::OSTCBStatPend , 以及 OS_TCB::OSTCBY.

| INT32U OSTimeGet | ( | void | ) |
参考 OS_ENTER_CRITICAL, OS_EXIT_CRITICAL , 以及 OSTime.
| void OSTimeSet | ( | INT32U | ticks) |
参考 OS_ENTER_CRITICAL, OS_EXIT_CRITICAL , 以及 OSTime.
 1.8.4
1.8.4 

