|
UCOS_TI_LM3S_Keil
|
#include <cpu.h>#include <cpu_core.h>#include <bsp_int.h>#include <bsp_ser.h>#include <bsp_os.h>#include <hw_ints.h>#include <hw_memmap.h>#include <hw_types.h>#include <gpio.h>#include <interrupt.h>#include <sysctl.h>#include <uart.h>#include <rit128x96x4.h>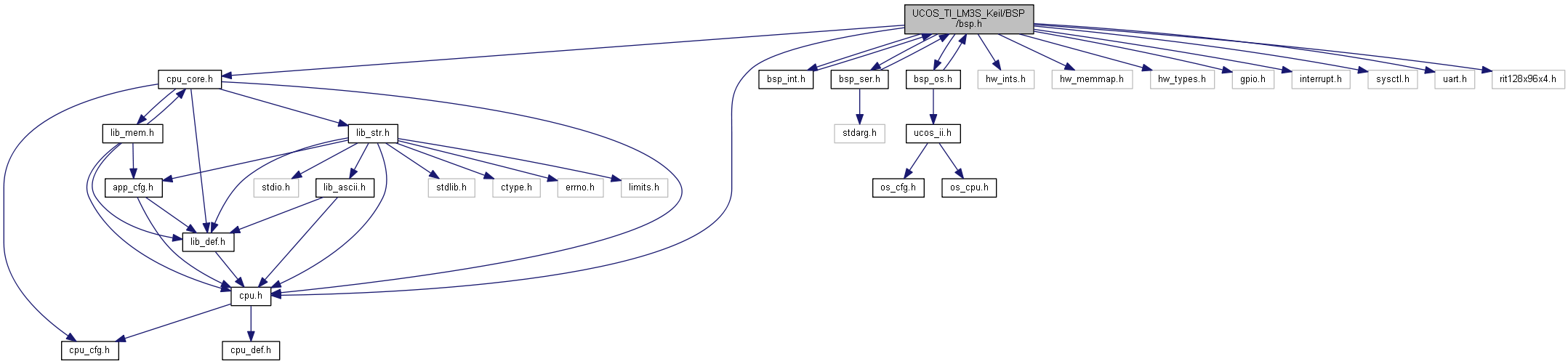

宏定义 | |
| #define | BSP_EXT extern |
函数 | |
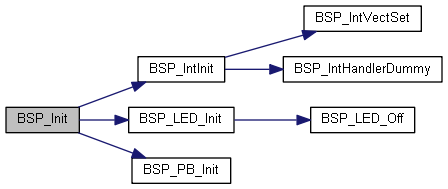
| void | BSP_Init (void) |
| CPU_INT32U | BSP_CPU_ClkFreq (void) |
| void | BSP_LED_Off (CPU_INT08U led) |
| void | BSP_LED_On (CPU_INT08U led) |
| void | BSP_LED_Toggle (CPU_INT08U led) |
| CPU_BOOLEAN | BSP_PB_GetStatus (CPU_INT08U pb) |
| void BSP_Init | ( | void | ) |
| CPU_INT32U BSP_CPU_ClkFreq | ( | void | ) |
| void BSP_LED_Off | ( | CPU_INT08U | led) |
| void BSP_LED_On | ( | CPU_INT08U | led) |
参考 BSP_GPIOG_PWM0.
| void BSP_LED_Toggle | ( | CPU_INT08U | led) |
| CPU_BOOLEAN BSP_PB_GetStatus | ( | CPU_INT08U | pb) |
参考 BSP_GPIOG_SW_DOWN, BSP_GPIOG_SW_LEFT, BSP_GPIOG_SW_RIGHT, BSP_GPIOG_SW_SELECT, BSP_GPIOG_SW_UP, DEF_FALSE , 以及 DEF_TRUE.
参考自 App_TaskKbd().

 1.8.4
1.8.4